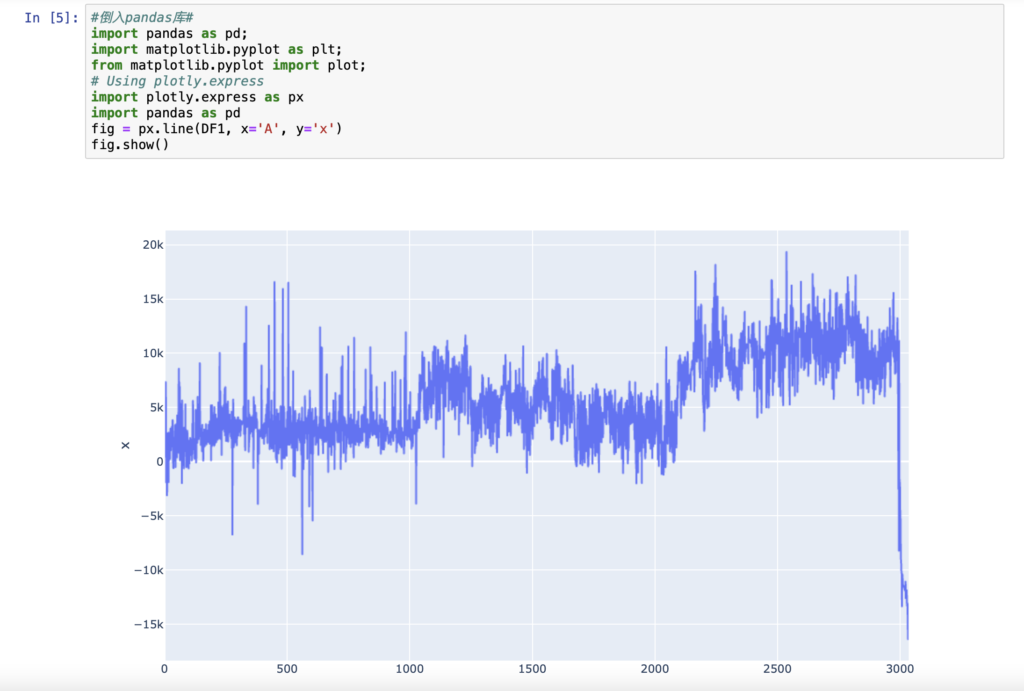
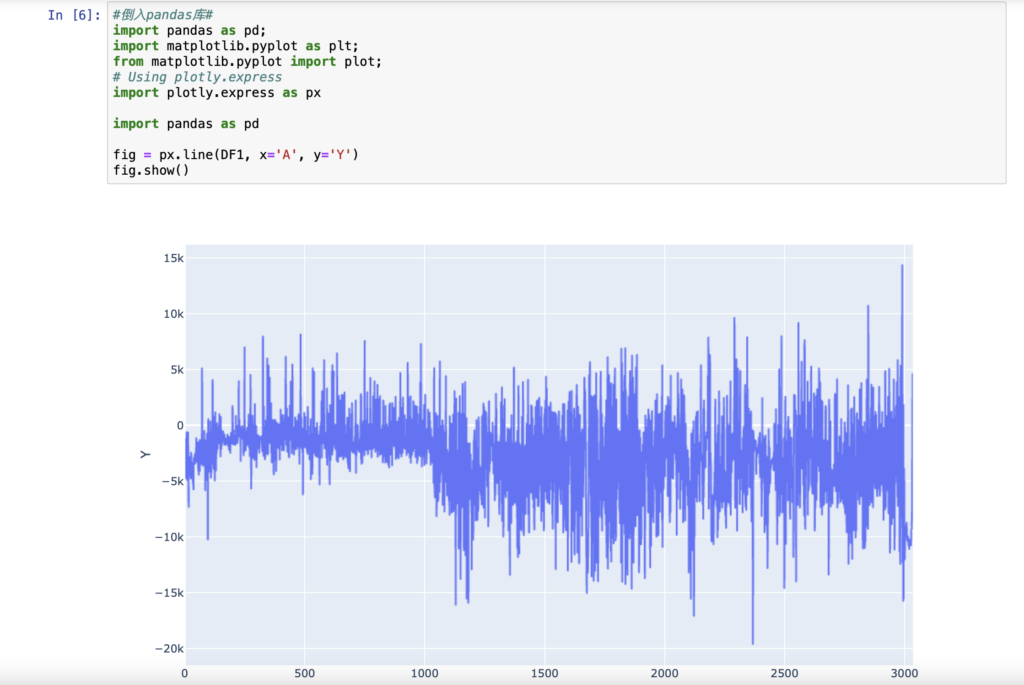
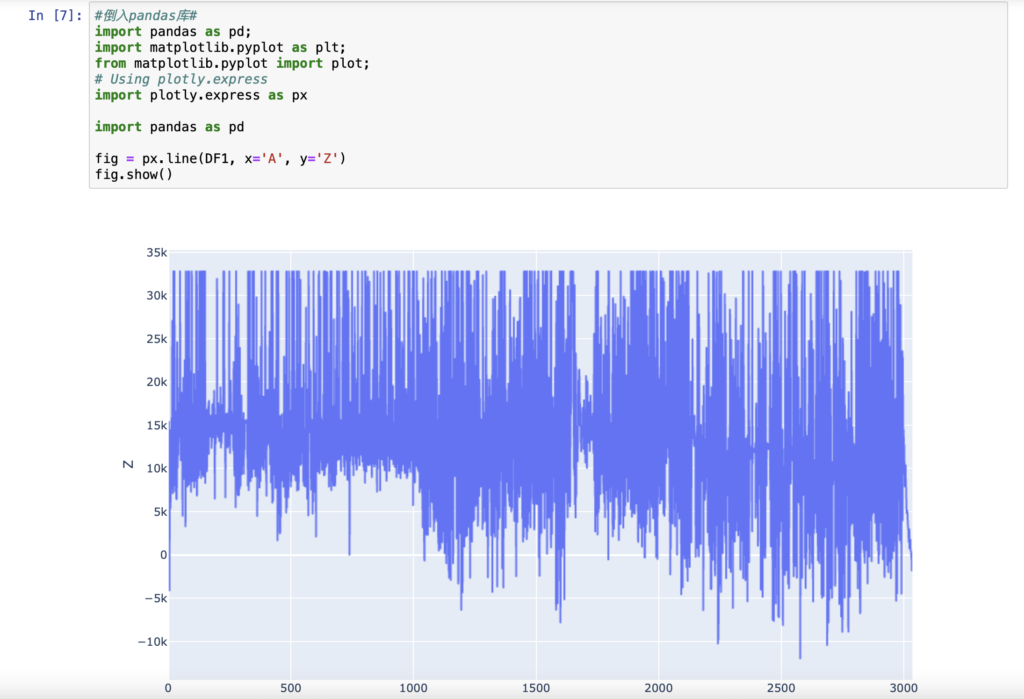
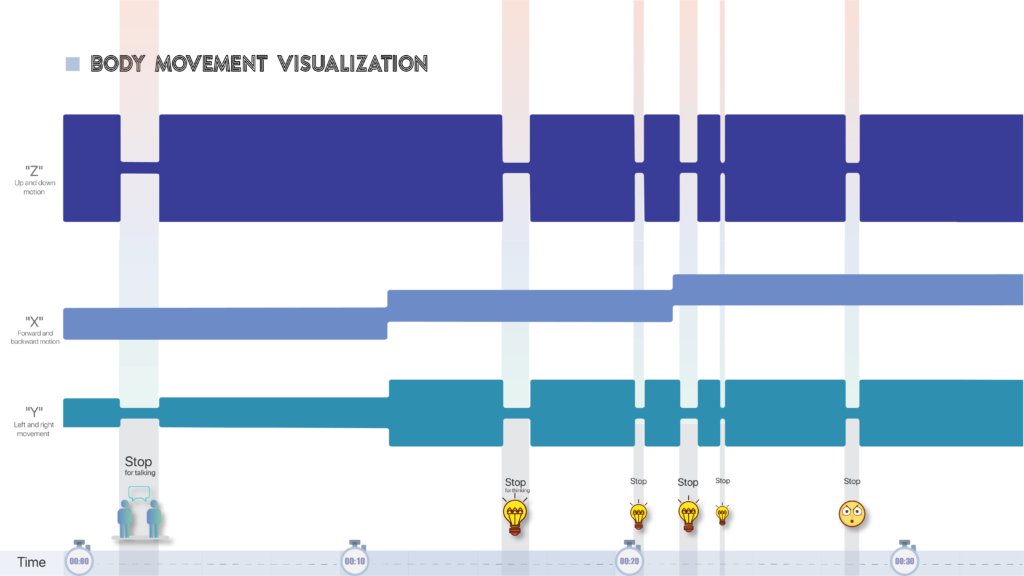
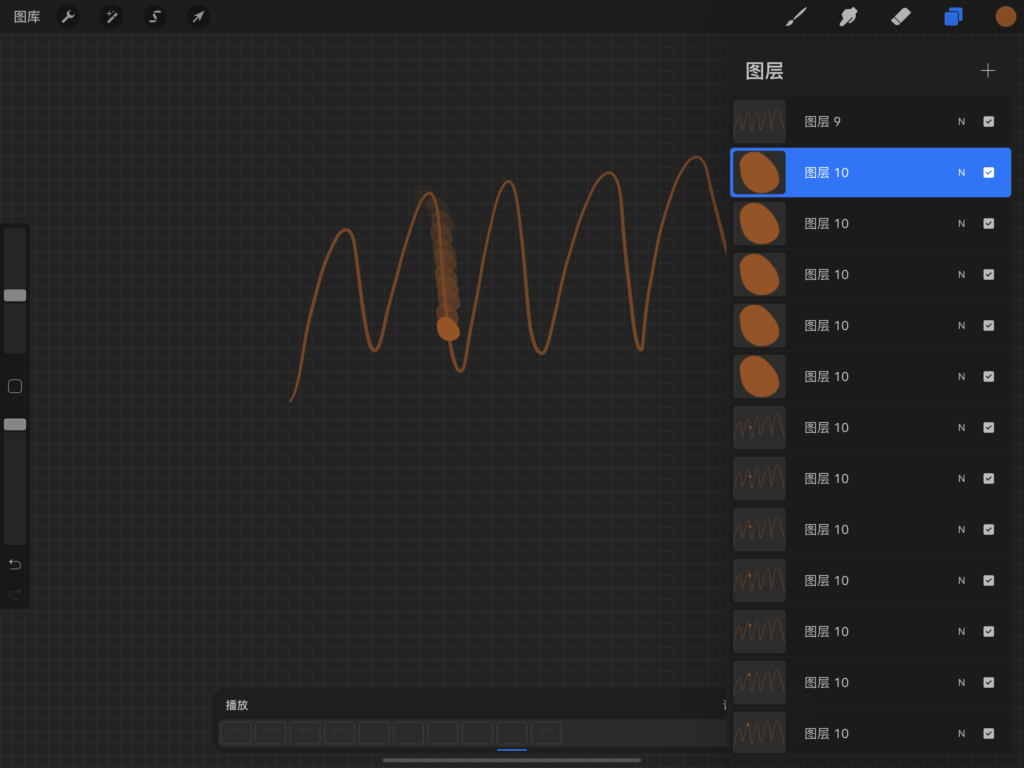
As shown in the right figure, “X”, “Y” and “Z” motion tracks are combined to observe, and according to the live record of the camera and the power on data of finger touch, the data obtained is analyzed as follows:
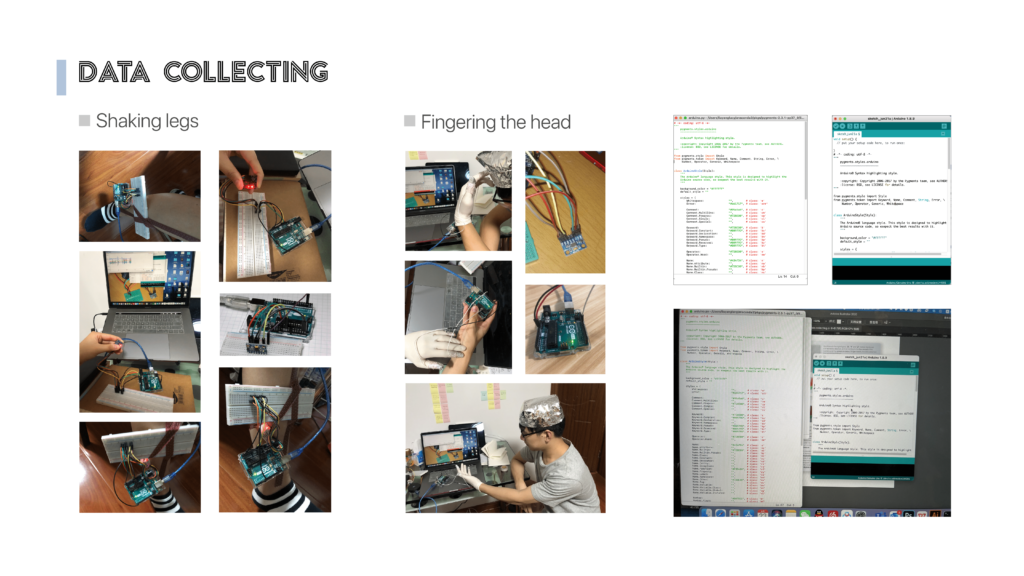
In about ten minutes from the beginning, there will be no change in the direction of shaking legs. Keep shaking up and down.
Ten minutes later, the shaking leg starts to increase its strength and change the shaking direction. It will move f orward and start shaking the leg left and right while shaking the leg up and down.
Combined with the working state and video content, when the first stop of leg shaking, the subject was interrupted and had a conversation during thinking, and after returning to the working state, he continued to think, and then began to shake the leg.
Select the data with long pause and the first touch of the head in the figure for specific analysis.
There are three times of touching the head, each time when you go into deep thinking or come up with a good idea, you will stop shaking your legs and start touching your head at the same time. But they are all short-lived. According to the situation that the subject stops or slows down the frequency of shaking legs but does not touch his head during the reaction period, he enters the meditative state (stupor).
In the process of work, study and so on, people need to use their brain and sit still. After entering the state of thinking, the limbs will automatically start some habitual actions, and maintain this action when they are in the state of continuous thinking. But when the problem is not solved and deep thinking is started, the body movement will be stopped and deep thinking will be carried out in the most familiar and comfortable state of the body. This state will last for dozens of seconds.